《上海交通大学学报》

上海交通大学团队研制深海重载作业采矿车圆满
来源:上海交通大学学报 【在线投稿】 栏目:综合新闻 时间:2021-04-272021年4月,上海交通大学海洋工程团队研制的深海重载作业采矿车样机,搭载于“张謇”号科考船,在我国南海圆满完成了海底智能行进与路径跟踪试验,通过海上布放回收、水下精准定位、海底作业路径规划、智能行进控制等一系列试验,验证了海上布放回收姿态自动控制、海底智能自主行进控制等创新技术,达到了预期研究目标。
该深海采矿车以深海多金属结核为开发作业对象,长5.6米,宽2.5米,高2.0米,空气中重量8.0吨,设计作业水深3000米,具有海底作业环境感知、智能自主控制、高效水力集矿等作业能力。

采矿车布放入水
为满足未来海底矿产资源工程开发的需要,项目组前瞻性研发采矿车智能自主行进技术,实现采矿车海底行进过程中的闭环反馈控制,基于规划的作业路径和水下精确定位信息,实时、智能控制采矿车行进方向、位移和速度等运动姿态,首次实现采矿车海底大曲率曲线路径高精度跟踪。图2为采矿车实时行进轨迹与S形规划目标路径对比,两者高度吻合,最大跟踪误差仅0.40m。图3为ROV声呐测得的海底试验现场,采矿车S形轨迹清晰可见。
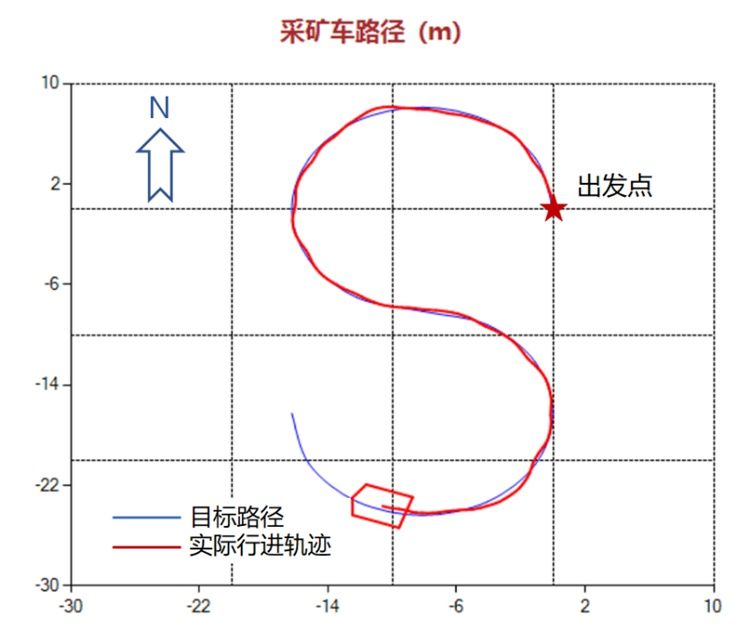
采矿车实时行进轨迹

ROV声呐测量采矿车轨迹
针对重载作业采矿车海上安全布放和回收难题,项目组创新提出了采矿车水中运动姿态自动控制方法,实时控制推进器推力分配,在海上布放和回收过程中,自主、稳定保持艏向角方向。在此次海试的多次布放和回收过程中,采矿车在高速海流作用下,艏向角控制最大偏差小于1.4度,实现了采矿车在水中运动姿态的精准控制,保障采矿车可控、稳定地布放与回收。

采矿车布放姿态控制
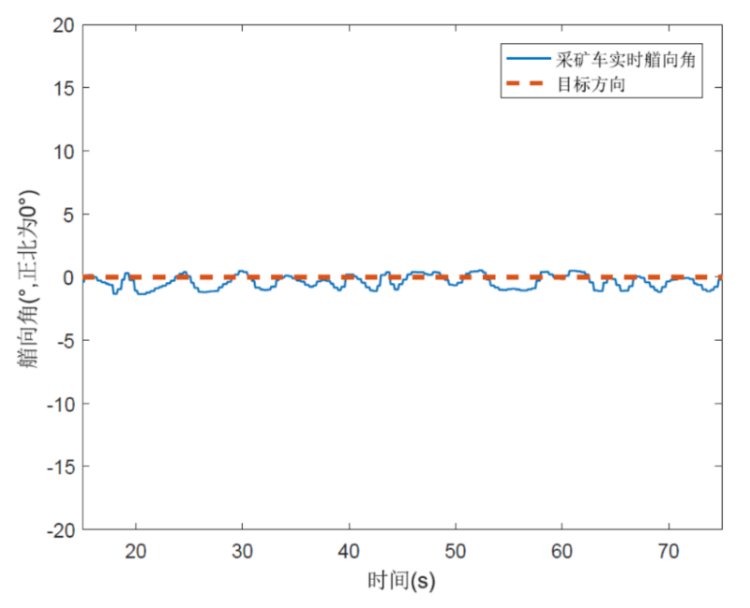
采矿车首向角控制时间历程
在此次海试过程中,受今年第二号超强台风“舒力基”影响,试验海域达四级海况,出现严重低频涌浪,给采矿车布放回收、船舶定位、人员操作、采矿车作业等带来很大挑战。项目组克服重重困难,团结奋战,圆满完成了全部试验任务。

项目组团队自三亚崖州湾启航执行海试任务
【来源:上海交通大学】
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本网联系,我们将及时更正、删除,谢谢。 邮箱地?/p>